CASE
- Connected
- Autonomous自動運転
- Shared & Service
- Electric
CASEにおける「Autonomous(自動運転)」の定義
人が行う車の運転は「認知」「判断」「制御」の3つの動作に分類することができます。
自動運転とは、カメラ、LiDAR、ミリ波レーダー、GNSSやデジタル地図などを用いて自車と周りの状況を「認知」し、その情報を基にAI(人工知能)などを用いて「判断」や「制御」を行うことで自律走行を実現する技術です。
自動運転の実現に向けて、ハードウェアはもちろんのこと、ソフトウェアの重要性にも注目が集まっています。
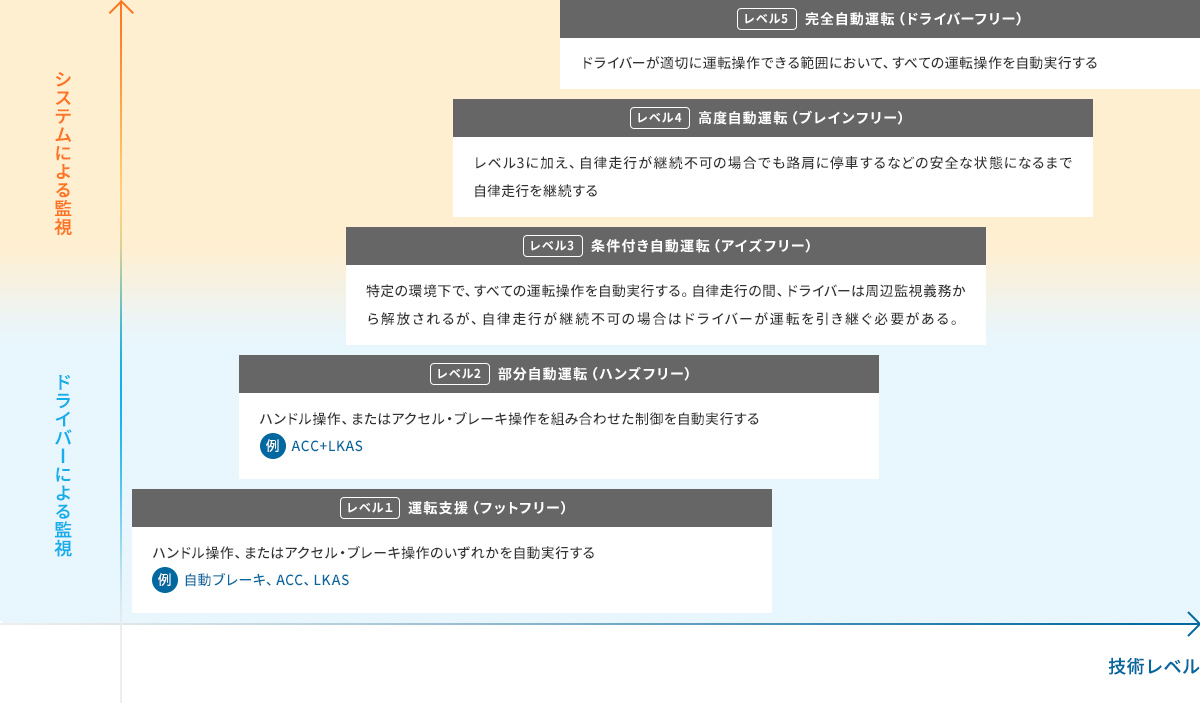
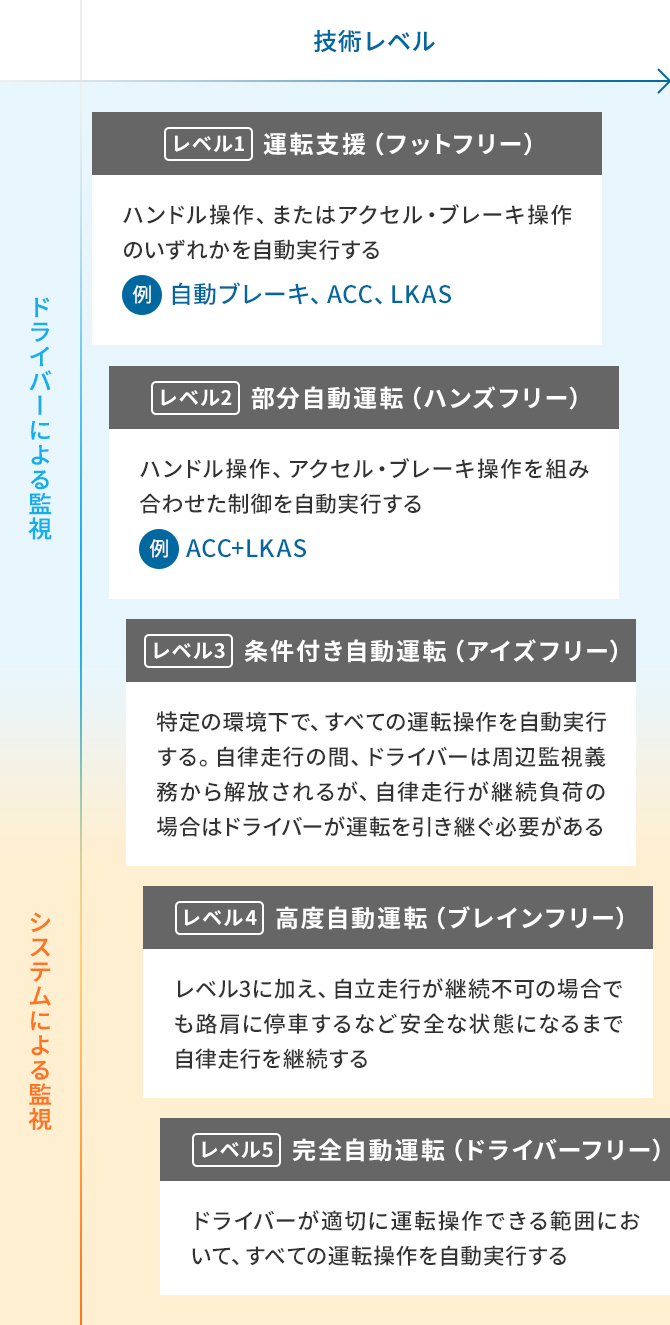
自動運転は、実現する機能により下図のとおり5段階にレベルが設定されています。

「Autonomous(自動運転)』へのニーズ
自動運転の実現によって、下記のような効果が期待されています。
- 事故や運転負担の軽減 ※交通事故の約9割はドライバーの法令違反が原因
- 渋滞の緩和
- 高齢ドライバーの事故防止
- 高齢者を含む移動弱者への利便性の提供
- タクシー、バス、トラックなどのドライバー不足の軽減
- 駐車場不足の緩和
- 自動運転を使った新たなサービスの発展
例)衝突被害軽減自動ブレーキ、全車速追従機能、車線キープ、ステアリングアシスト、etc...


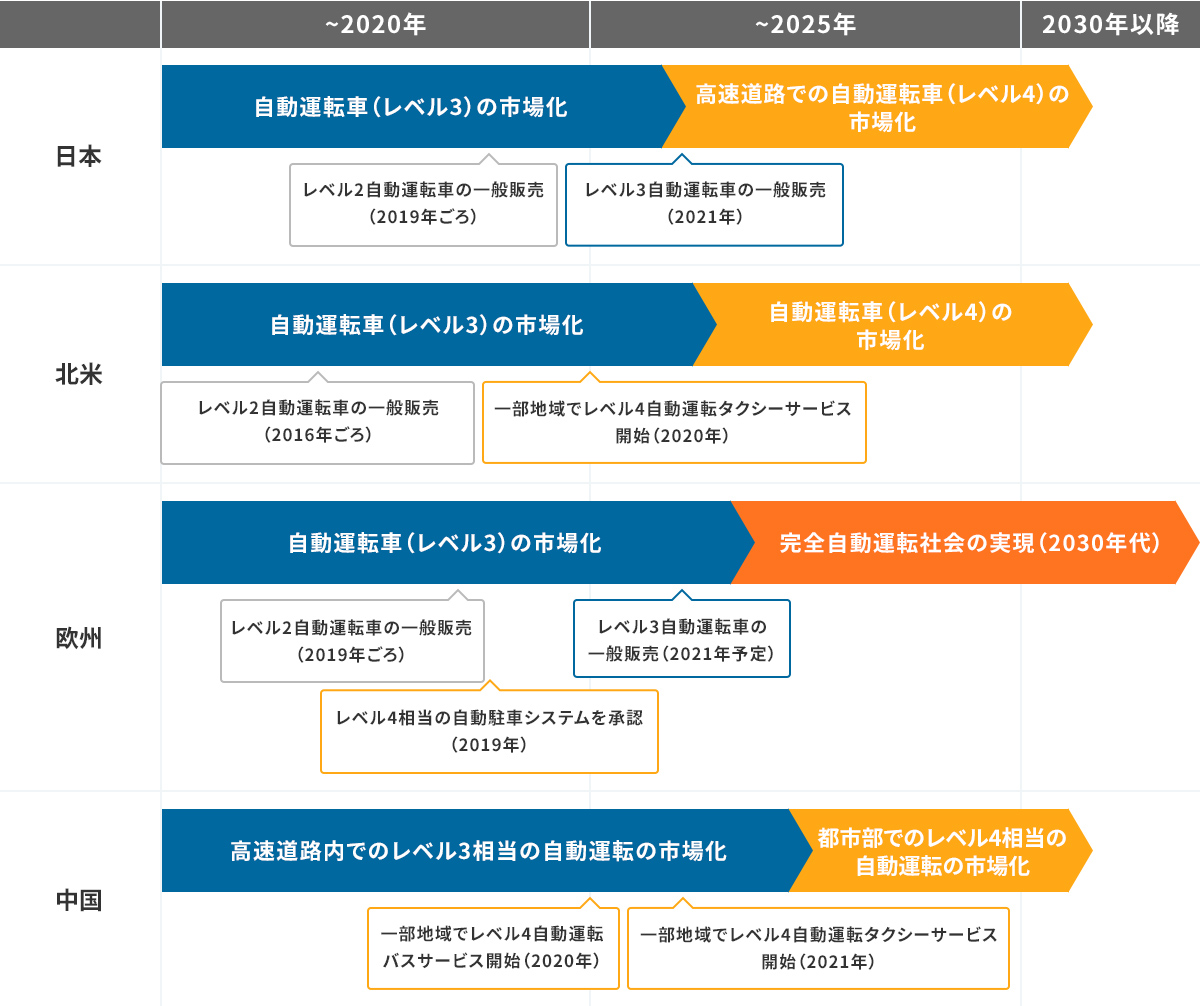
地域別のロードマップ
自動運転の実現に向けた、代表的な各地域におけるロードマップは以下の通りとなっています。2021年現在、各地域において、自動運転車の実用化や自動運転車を用いたサービスが開始されています。また、2025年の完全自動運転の実現に向け、技術開発の更なる加速が見込まれます。
自動運転技術の課題
自動運転を実現するためには多くの課題があり、その課題解決に向けて世界各国で環境整備や自動運転技術の普及が進められています。各自動車メーカー様、サプライヤー様においても、技術開発が行われています。
環境整備の課題
国際基準の整備
- 安全・公害に対する基準の統一
自動運転車に対応する法整備
- 自動運転車の定義
- 責任所在の明確化
交通インフラの整備
- 自動運転車専用道路の整備
- 老朽化の更新
など

技術開発の課題
安全性の課題
- ドライバーに代わる「認知」「判断」「制御」の実現
セキュリティ面の課題
- サイバー攻撃に対するセキュリティ対策
ドライバーとの協調性
- 自動運転作動状況の通知(HMIなど)
など
関連技術
自動運転は、人が行う安全確認、状況判断、情報収集を自動車が行うことで、運転を自動化する技術です。その実現に向けてさまざまな技術が必要となります。
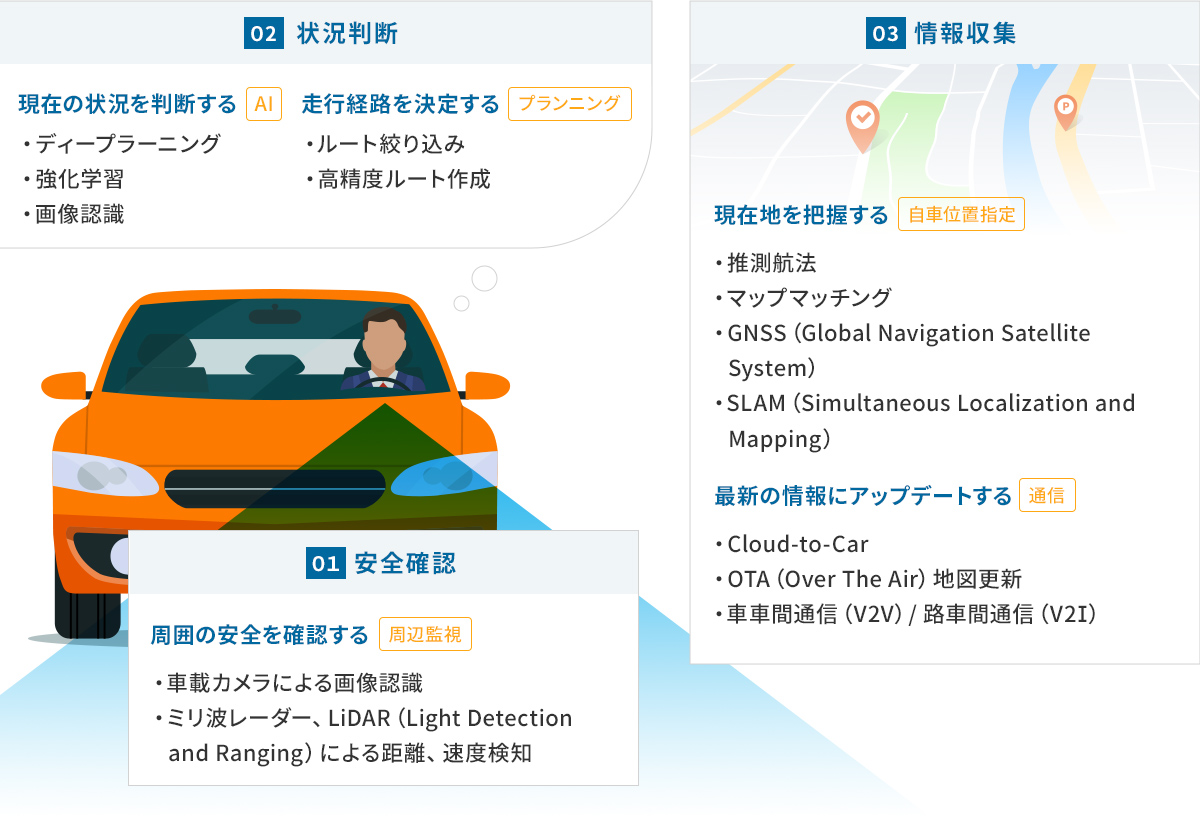
01安全確認
自動運転において安全確保は最も大切な技術です。運転者が目視で認識する情報を、カメラを用いた画像認識やレーダーによる距離検知によって、車外の歩行者やモノを認識し運転者の目として働きます。
02状況判断
視覚から得た情報で瞬時に人は目的に沿った判断を行います。自動運転車両もまた、AIによる判断を繰り返すことで、運転者や歩行者にとってより良い判断を行います。
03情報収集
人は地図を見て、現在地や目的地へのルートを知ることができます。自動運転においては古い地図は事故に直結します。自動運転車両はデータセンターとつながることで、常に最新の地図による運転を実現します。
Sky株式会社実績紹介
- パワートレイン系ECU
- エンジンECU
- トランスミッションECU
- EV / HV ECU
- パワーコントロールECU
- 電池ECU
- EVECU
- HVECU
- シフトバイワイヤECU
- ボディ系ECU
- ボディコントロールユニット
- スマートECU
- パワースライドドア/バックドアECU
- シートECU
- サンルーフECU
- ADAS系ECU
- ステレオカメラECU
- V2X ECU
- 周辺監視ECU
- ロケーターECU
各ECUにおける実績
| ECU | 機能イメージ | 保有技術 |
|---|---|---|
| ステレオカメラECU |  |
自車前方などに設置したカメラにより、道路上の白線、信号機、標識などを検知します。
|
| 周辺監視ECU |  |
ミリ波レーダーの反射を検知し、対象との距離、速度、形状などを検知します。
|
| V2X ECU |  |
車両同士や、車両と道路との通信を行い、さまざまな情報をやり取りします。
|
| ロケーターECU |  |
慣性センサー、地図、人工衛星を用いて自車の現在地を推定します。
センサー情報から周囲の地図を生成しながら自車の現在地を推定します。
|
 |
データセンターとの通信を行い、常に最新の情報を取得します。
|
|
 |
さまざまな条件から利用者の目的に沿ったルートを絞り込みます。
|