

1.はじめに
近年の自動車は、多数のECUが連携して動作を行う複雑なシステム構成となっており車載ネットワークが非常に重要となっています。
車載ネットワークにて、広く使われている技術が「CAN」と呼ばれる通信方式です。今回はこのCAN通信について解説を行いたいと思います。
2.CAN通信とは
CAN通信は1980年代にドイツのボッシュ社で開発された通信プロトコルです。この通信は2本のバスを使用した、電圧の差動によって通信が行われる特徴を持ち、非常にノイズ耐性が強いことで知られています。
車載通信が行われる環境下においては、エンジン周辺等、非常にノイズが多い状況にあり、CAN通信は適した通信方式となっています。
また、2線式バスに複数のECUを連結することが可能なため、配線ハーネスの軽量化にも貢献しています。
3.CAN通信の仕組み
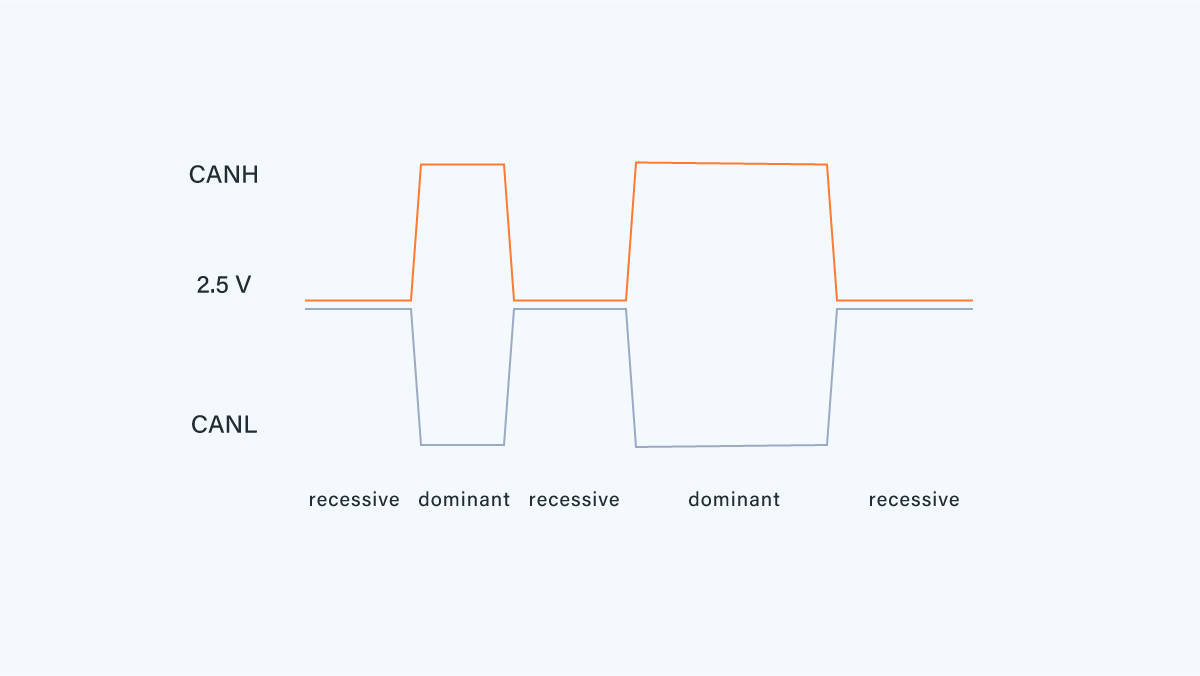
CAN通信では、CANHとCANLの差分によって、通信状態を決定します。CANH、CANLの差分が無い状態をレセシブ(1)、差分がある状態をドミナント(0)として扱います。
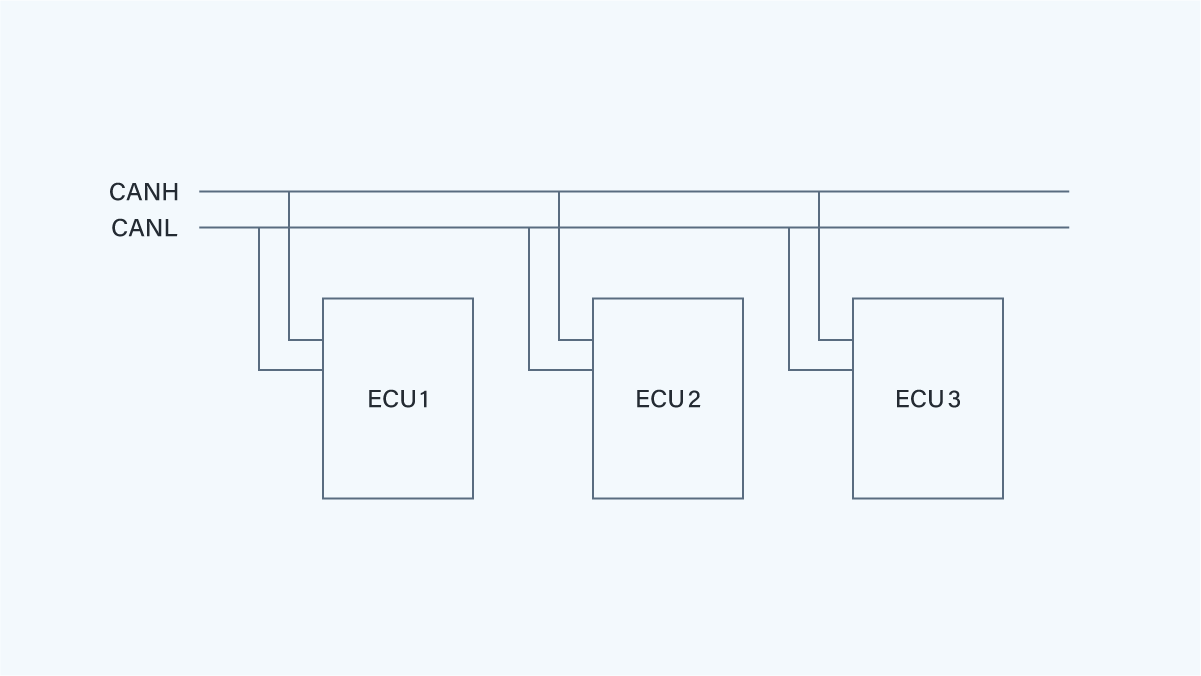
2線式のバス型ネットワークとなっており、1つのCANバスに複数のECUをつなげる事が可能です。
4.まとめ
現在では、車載通信はCAN以外の様々な通信方式が存在していますが、CAN通信は車の基本的な車体制御を行うには必要不可欠な通信方式です。 今後も、車載ネットワークを支える重要な通信プロトコルとしてCAN通信は存在していくことでしょう。
